Aparat Ruchu Sprawdzian Nowa Era Klasa 7

Hej Siódmoklasiści! Przygotowujecie się do sprawdzianu z Aparatu Ruchu? Świetnie! Ten artykuł pomoże Wam usystematyzować wiedzę, szczególnie jeśli lubicie wizualizacje i proste porównania. Zamiast suchej teorii, spróbujemy zrozumieć, jak to wszystko działa, tak jakbyśmy budowali robota! A pamiętajcie, sprawdzian Nowej Ery czeka, więc do dzieła!
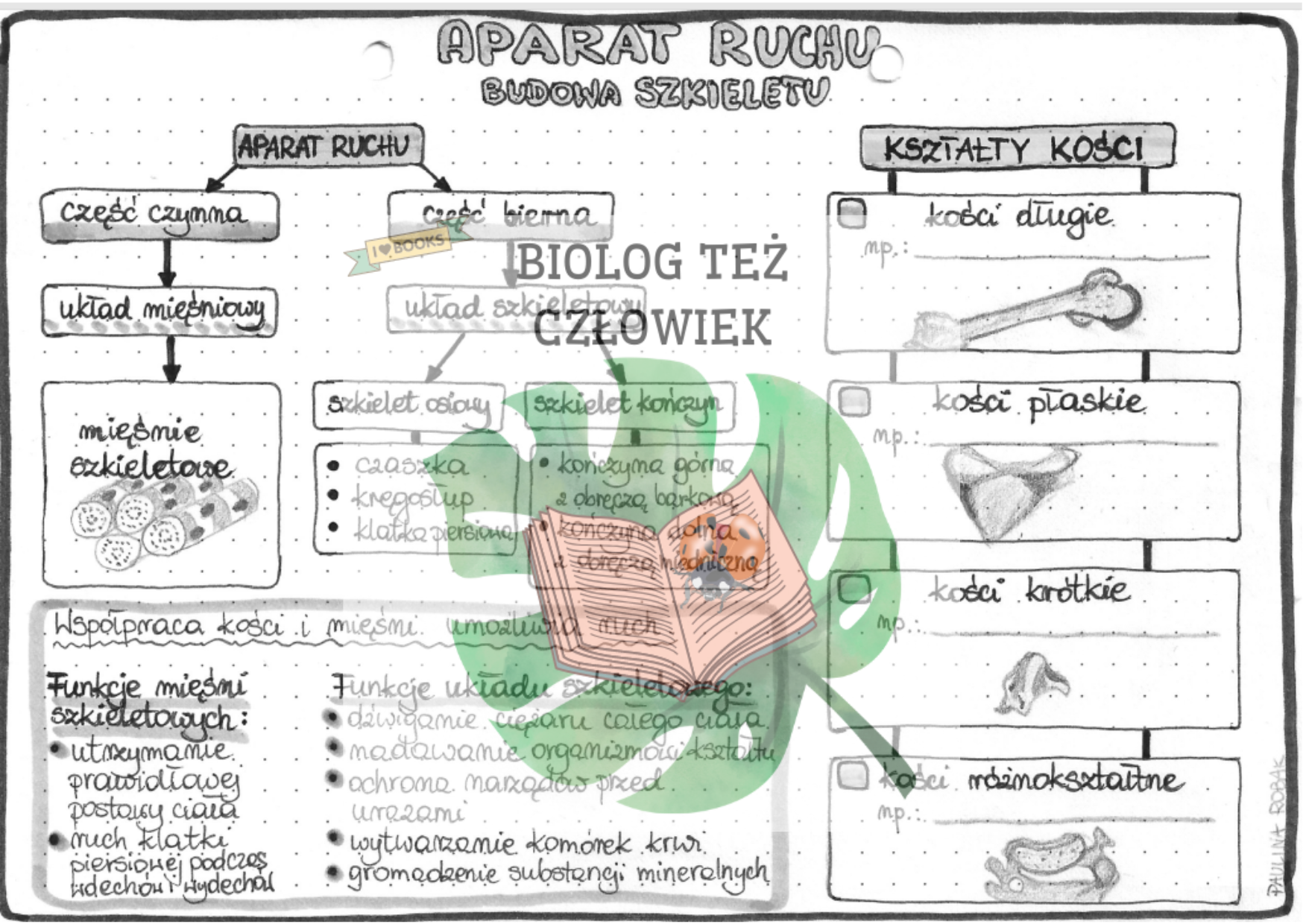
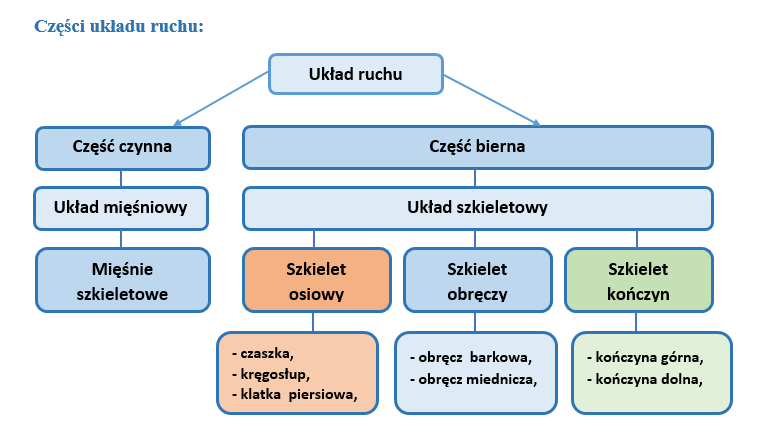
Szkielet: Fundament Robota
Pomyślcie o szkielecie jak o ramie robota. To on daje mu kształt i stabilność. Nasz szkielet to zbiór kości, które chronią nasze organy wewnętrzne (jak klatka piersiowa chroniąca serce i płuca) i umożliwiają ruch. Wyobraźcie sobie, co by było, gdyby robot nie miał ramy - rozpadłby się! Podobnie, bez szkieletu, bylibyśmy galaretowatą masą.
Rodzaje Kości
Kości są różne – długie, krótkie, płaskie i nieregularne. To jak różne elementy budowlane robota:
- Kości Długie: Wyobraźcie sobie długie, mocne rury. To kości udowe, piszczelowe, ramienne. Są długie i mocne, dźwigają nasz ciężar i umożliwiają długie kroki.
- Kości Krótkie: Małe, mocne bloki, jak kostki w nadgarstku i stawie skokowym. Dają elastyczność i umożliwiają precyzyjne ruchy. Pomyślcie o nich jak o małych, precyzyjnych zawiasach w robocie.
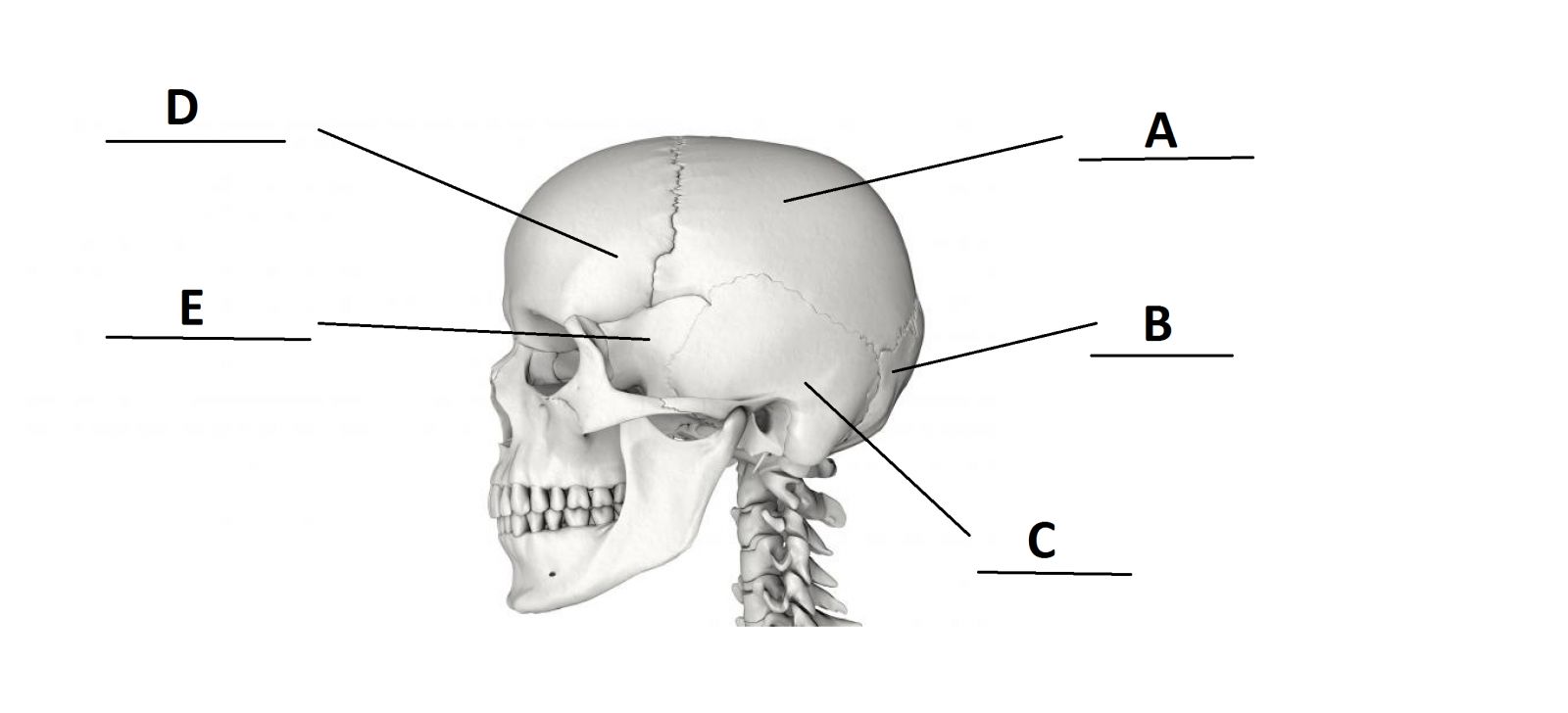
- Kości Płaskie: Płaskie, szerokie płyty, jak kości czaszki, łopatki i mostek. Chronią ważne organy i dają powierzchnię przyczepu dla mięśni. To jak pancerz robota.
- Kości Nieregularne: Trudne do opisania kształty, jak kręgi kręgosłupa. Każdy kręg jest inny, tworząc elastyczny i mocny kręgosłup, który chroni rdzeń kręgowy. To jak specjalnie zaprojektowane elementy robota, dostosowane do konkretnego zadania.
Zastanawialiście się kiedyś, dlaczego możemy się zginać? To dzięki połączeniom między kośćmi – czyli stawom.
Stawy: Zawiasy Robota
Stawy to miejsca, gdzie łączą się kości. Pomyślcie o nich jak o zawiasach w robocie, które pozwalają mu poruszać ręką, nogą, głową.
Rodzaje Stawów
Mamy różne rodzaje stawów, każdy z nich umożliwia inny zakres ruchu:
- Stawy Kuliste: Dają największy zakres ruchu we wszystkich kierunkach. Przykład: staw barkowy (umożliwia kręcenie ramieniem) i biodrowy (umożliwia kręcenie nogą). Wyobraźcie sobie kulę w gnieździe – robot może ruszać ręką w przód, w tył, na boki i obracać nią.
- Stawy Zawiasowe: Umożliwiają ruch tylko w jednej płaszczyźnie, jak zawias w drzwiach. Przykład: staw łokciowy (zgina i prostuje ramię) i kolanowy (zgina i prostuje nogę). Robot może tylko zginać i prostować rękę, ale nie może nią kręcić.
- Stawy Obrotowe: Pozwalają na obracanie jedną kością wokół drugiej. Przykład: połączenie kości promieniowej i łokciowej (umożliwia obracanie przedramieniem). Robot może obracać dłonią, ale nie może jej zginać.
- Stawy Płaskie: Umożliwiają minimalny ruch, ale dużą stabilność. Przykład: stawy między kręgami. Dają elastyczność kręgosłupa.
Co utrzymuje kości razem w stawie? Więzadła! To mocne, elastyczne pasma tkanki łącznej, które stabilizują staw i zapobiegają jego nadmiernemu ruchowi. Wyobraźcie sobie, że więzadła to liny, które trzymają części robota razem. A co chroni kości w stawie przed ścieraniem? Chrząstka stawowa! To gładka, elastyczna tkanka, która pokrywa powierzchnie stawowe i amortyzuje wstrząsy. Chrząstka to jak smar w maszynie, który zapewnia płynny ruch.
Mięśnie: Silniki Robota
Mięśnie to "silniki" naszego ciała. Bez nich szkielet byłby tylko bezwładną ramą. Mięśnie kurczą się i rozkurczają, pociągając za kości i wprawiając je w ruch.
Rodzaje Mięśni
Mamy trzy rodzaje mięśni:
- Mięśnie Szkieletowe: To one odpowiadają za ruch, który kontrolujemy świadomie. To mięśnie, które napinamy, gdy chcemy podnieść rękę, chodzić, biegać. Są przyczepione do kości za pomocą ścięgien (mocnych pasm tkanki łącznej). Wyobraźcie sobie je jak linki, które łączą silnik robota z jego kończynami.
- Mięsień Sercowy: Tworzy ściany serca i kurczy się rytmicznie, pompując krew po całym ciele. Nie mamy wpływu na jego pracę.
- Mięśnie Gładkie: Występują w ścianach narządów wewnętrznych, takich jak żołądek, jelita, naczynia krwionośne. Odpowiadają za ruchy, których nie kontrolujemy świadomie, np. perystaltykę jelit.
Jak to działa? Kiedy mięsień się kurczy, skraca się i pociąga za kość, do której jest przyczepiony. Potrzebujemy co najmniej dwóch mięśni, które działają antagonistycznie (przeciwstawnie), aby wykonać ruch. Na przykład, zginanie ręki w łokciu wymaga skurczu mięśnia dwugłowego ramienia (bicepsu) i rozkurczu mięśnia trójgłowego ramienia (tricepsu). Przy prostowaniu ręki sytuacja się odwraca. To jak dwa roboty współpracujące ze sobą, aby poruszać jednym ramieniem – jeden zgina, a drugi prostuje.
Podsumowanie
Aparat ruchu to skomplikowany, ale fascynujący system! Pamiętajcie, że:
- Szkielet to rama robota, dająca mu kształt i ochronę.
- Stawy to zawiasy, umożliwiające ruch.
- Mięśnie to silniki, wprawiające robot w ruch.
Teraz, uzbrojeni w tę wiedzę i wyobraźnię, na pewno poradzicie sobie na sprawdzianie z Aparatu Ruchu! Powodzenia!
Pamiętajcie, regularna aktywność fizyczna wzmacnia Wasz aparat ruchu i pomaga utrzymać go w dobrej kondycji!